Jisang Park
Stanford MSCS student and Robotics Researcher at IPRL Lab, with 1.5+ years of experience as a Research Scientist at KAIST. My research interest lies in developing a robot foundation model for mobile bi-manipulators and humanoids through data-efficient multimodal and interactive learning.
Prior to my research path, I co-founded three startups, gained experience in strategic consulting, and majored in Business Administration and Computer Science. This background motivates my focus on translating robotics research into practical, impactful products.
Robotics Systems
Reactive Mobile Manipulation
3D Scene Graph, Inverse Kinematics, Behavior Tree, ROS2 Continue reading Reactive Mobile Manipulation
Reactive Task Planning
Vision-Language Model, EBNF, Autoregressive Plan Monitoring Continue reading Reactive Task Planning
Adaptive Mobile Manipulation
RViZ, MoveIt!, Open3D, Behavior Tree, Collision Recovery Continue reading Adaptive Mobile Manipulation
Voice-based Robot Navigation
ROS, RViZ, Qt, Nvidia Riva, LINGO-Space, Jetson Continue reading Voice-based Robot Navigation
Publications
ForeSight: Autoregressive Plan Monitoring for Efficient Long-Horizon Execution in Changing Environments
J. Park, G. Eo, J. Lee, J. Park, Y. Kim, D. Park
To be submitted to IEEE Robotics and Automation Letters (RA-L), 2025
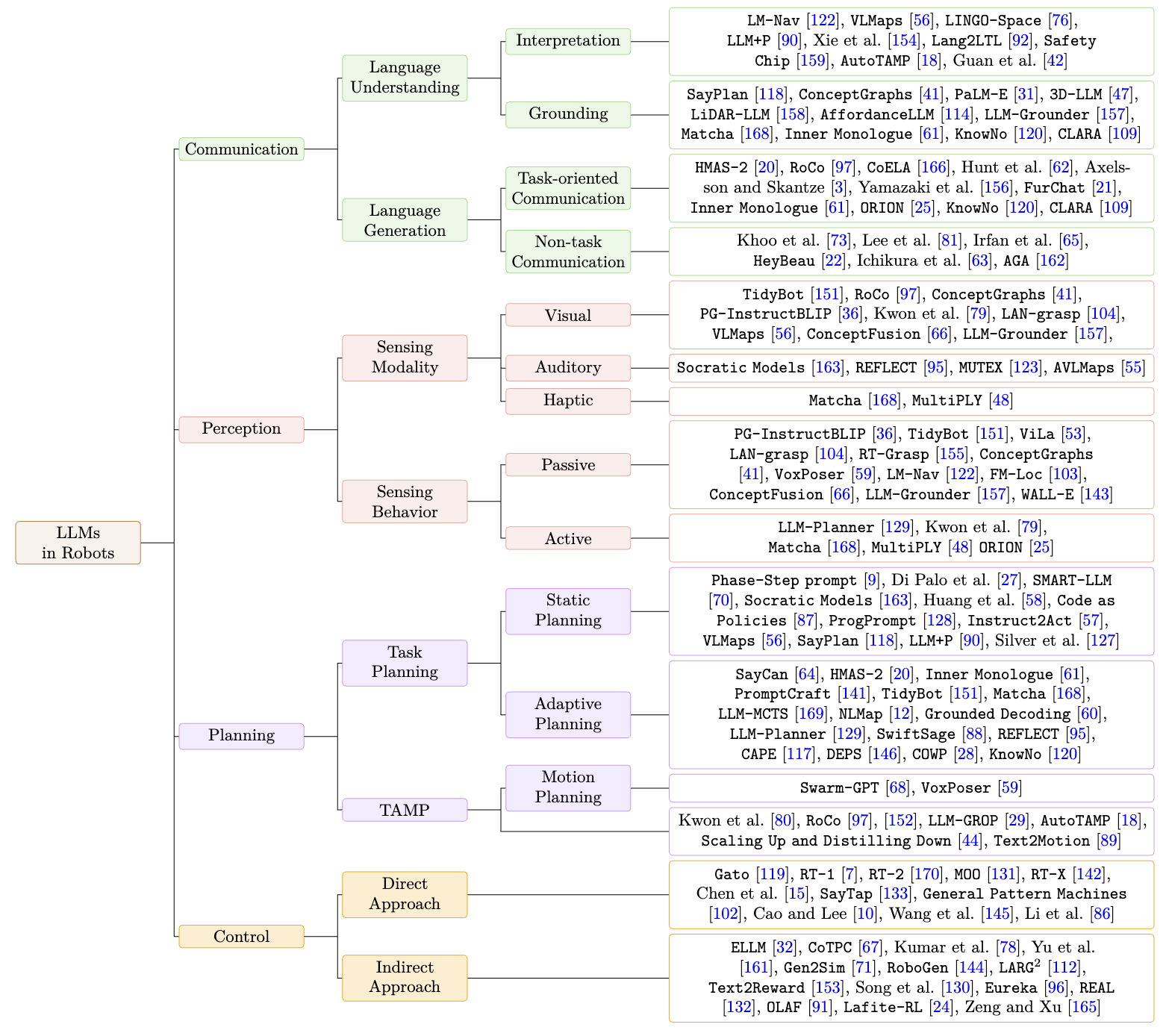
A Survey on Integration of Large Language Models with Intelligent Robots
Y. Kim, D. Kim, J. Choi, J. Park, N. Oh, D. Park
Intelligent Service Robotics, 2024