
Jisang Park
I am a Stanford MSCS student and robotics researcher at the IPRL Lab & REAL Lab, where I am co-advised by Jeannette Bohg and Shuran Song. I am fortunate to be directly mentored by Dian Wang and to work closely with Xiaomeng Xu and Han Zhang. Before Stanford, I spent 1.5+ years as a Research Scientist at KAIST. My research focuses on data-efficient and generalizable policy learning for long-horizon bimanual mobile manipulation.
Prior to my research path, I co-founded three startups, gained strategic consulting experience at McKinsey & BCG, and majored in Business Administration and Computer Science. This background motivates my focus on translating robotics research into practical, impactful products.
News
- Jul 2026 Officially Released Mixture of Frames Policy!
- Jun 2026 Awarded a Graduate Research Assistantship with Jeannette Bohg.
- Apr 2026 HoMMI was accepted to RSS 2026.
- Apr 2026 Awarded a Graduate Research Assistantship with Jeannette Bohg.
- Jan 2026 Awarded a Graduate Research Assistantship with Jeannette Bohg.
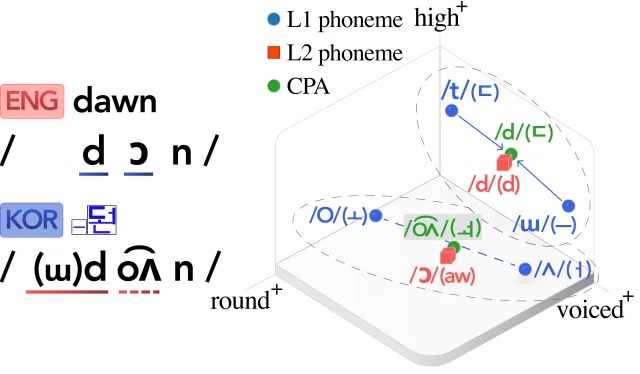
- Nov 2025 Compositional Phoneme Approximation was accepted to IJCNLP-AACL 2025.
- Sep 2025 Joined IPRL Lab & REAL Lab, mentored by Dian Wang.
- Sep 2025 Started the MSCS program at Stanford University.
- Jan 2024 Appointed as a Research Scientist at KAIST Robust Intelligence & Robotics Lab.
- Sep 2023 Joined KAIST Robust Intelligence & Robotics Lab.
- Aug 2022 Graduated from Seoul National University with Summa Cum Laude.
Research
Robotics: Science and Systems (RSS 2026)
Intelligent Service Robotics, 2024
Proceedings of the 44th Annual Conference of the Cognitive Science Society, 2022
* Equal contributions.
Projects
Skills: ROS2, Behavior Trees, YOLO, SAM, IK, Dynamic & Semantic 3D Scene Graphs
Engineered a real-time ROS2 framework for reactive mobile manipulation by parallelizing YOLO/SAM-based 3D scene graph construction and IK-based control via multi-threaded Behavior Trees.
Skills: Simulation Benchmarking, LLM-based Task Planning
Developed a framework-agnostic benchmark setting for evaluating diverse LLM/VLM-based task-planning frameworks across 100 interruption scenarios in AI2-THOR.
Skills: ROS2, Behavior Trees, MoveIt, Open3D, Force-Torque Sensing, RGBD Sensing
Developed an adaptive manipulation framework combining force-torque-sensor-based collision recovery, 3D pose-driven action adaptation, and MoveIt/Open3D manipulability analysis in dynamic environments.
Skills: ROS2, RViz, Qt, NVIDIA Riva ASR, Natural-Language Grounding, 2D LiDAR
Developed a voice-based robot navigation framework through a Qt-based RViz plugin integrating NVIDIA Riva ASR, natural-language goal grounding on a 2D LiDAR map, and ROS2 navigation stacks.
Service
Reviewer
- CoRL 2026
- ICRA 2026 Workshop on Reinforcement Learning in the Era of Imitation Learning (RL4IL)
- CVPR 2026 Workshop on Foundation Models Meet Embodied Agents (FMEA)
- CoRL 2025
Teaching
- Digital Computer Concept and Practice, Undergraduate Course Assistant, Fall 2021 - Spring 2022, Seoul National University
- Core Computing: Thinking with Computers, Undergraduate Tutor, Fall 2021, Seoul National University
- Basic Computing: First Adventures in Computing, Undergraduate Tutor, Fall 2021, Seoul National University
Education
|
Stanford University
M.S. in Computer Science
Sep 2025 - Jun 2027 (Expected)
Advisors: Jeannette Bohg and Shuran Song |
|
Seoul National University
B.S. in Computer Science & Engineering, B.B.A. in Business Administration
Mar 2017 - Aug 2022
Grade: GPA 3.90/4.00 (Summa Cum Laude) |