Eliminated prototyping costs by developing a manipulability analysis module integrating Open3D-based dynamic environment generation with MoveIt! and RViz
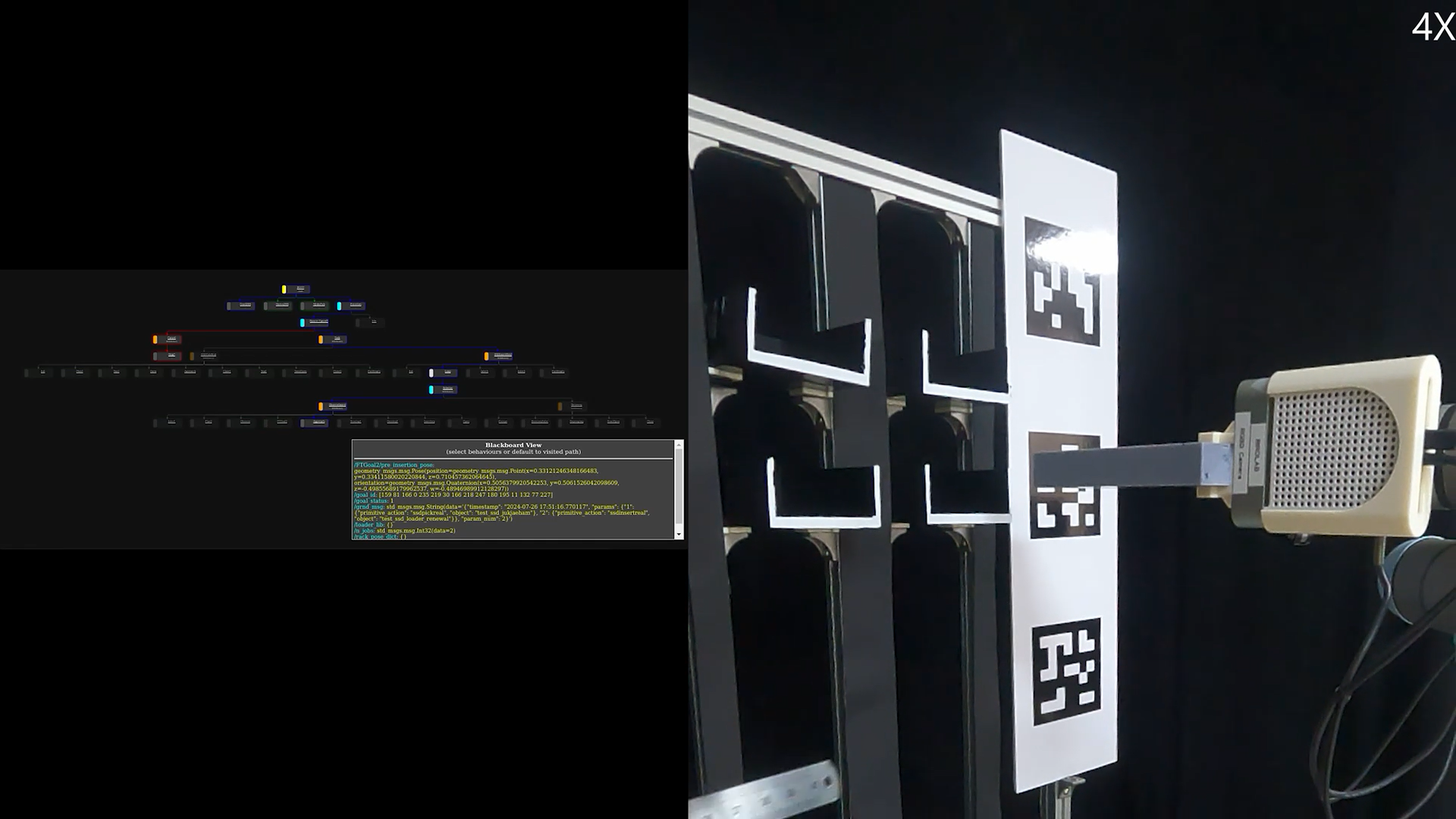
Improved execution robustness by designing an adaptive manipulation framework with force-torque sensor–based collision recovery and 3D pose–based action adaptation via Behavior Tree
Set up a real-world demonstration framework by integrating hardware components, including Universal Robots UR5e with a mobile base, Robotiq-85 Gripper, and Azure Kinect Camera, with ROS2