Planning and Control
Projects | | Links:
Adaptive Task Execution in Real-World Environments
Problem Formulation
- Problem: Robustification of task execution by mobile manipulators in indudstrial environments
- Challenge: Continuous change in environment configurations
- Solution: Manipulability validation within dynamic 3D envionment and behavior tree-based recovery system
Approach
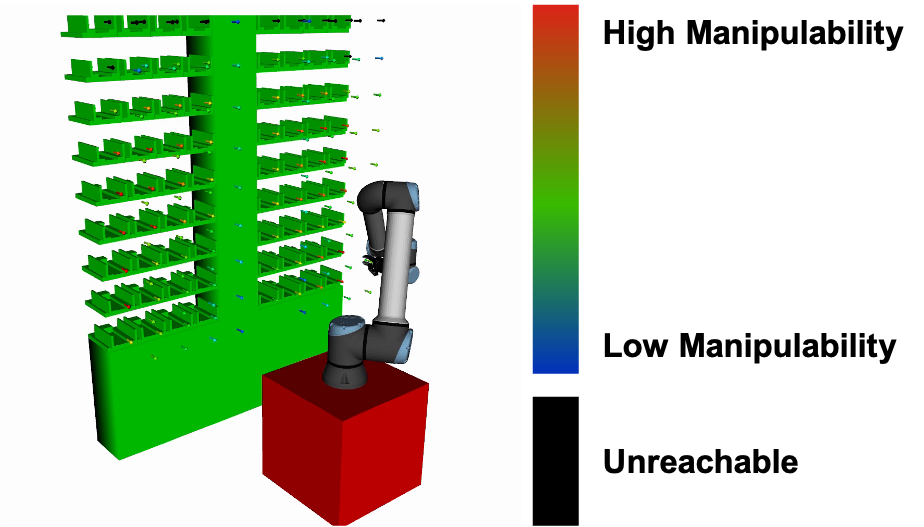
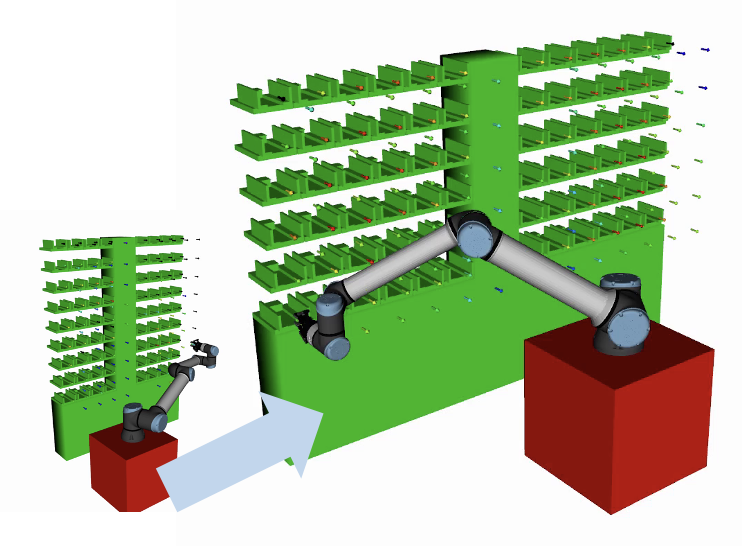
- Developed a simulation module integrating Open3D-based dynamic environment generation with MoveIt! and RViz, enabling comprehensive manipulability analysis across 15 configurable parameters
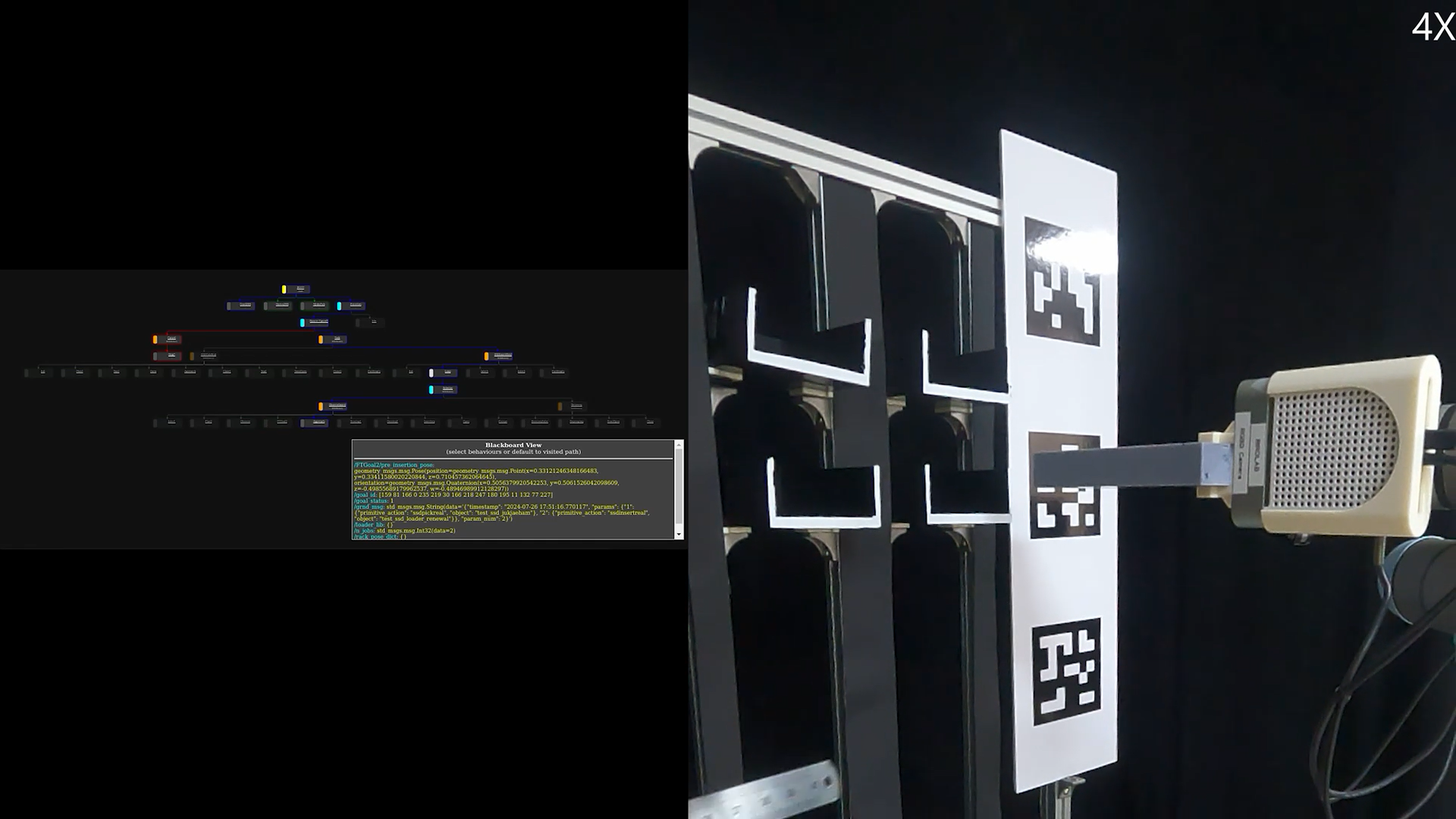
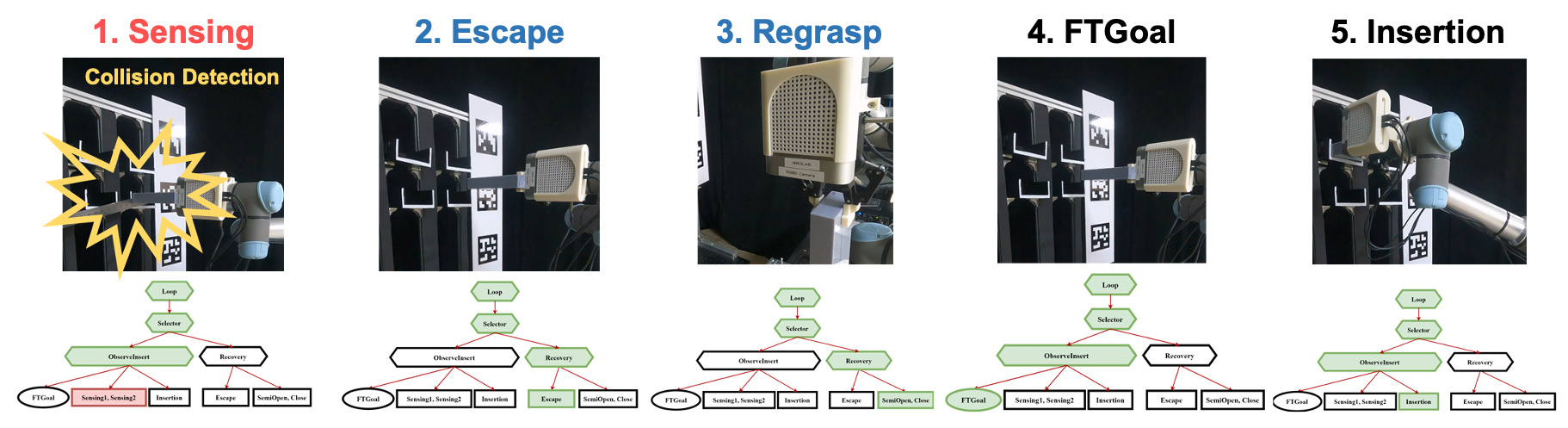
- Integrated a collision recovery algorithm and object 3D pose estimation-based action adaptation into a behavior tree for adaptive task execution
- Set up a real-world demonstration framework by integrating hardware components, including Universal Robots UR5e with a mobile base, Robotiq-85 Gripper, and Azure Kinect Camera, with ROS2
Results
- Achieved a successful real-world demonstration of task adaptation to dynamic environmental changes
- Achieved a successful real-world demonstration of task recovery from unexpected environmental interruptions