Reactive Mobile Manipulation
- Engineered a real-time ROS2 framework for reactive mobile manipulation by parallelizing 3D scene-graph construction and IK-based control through Behavior Tree
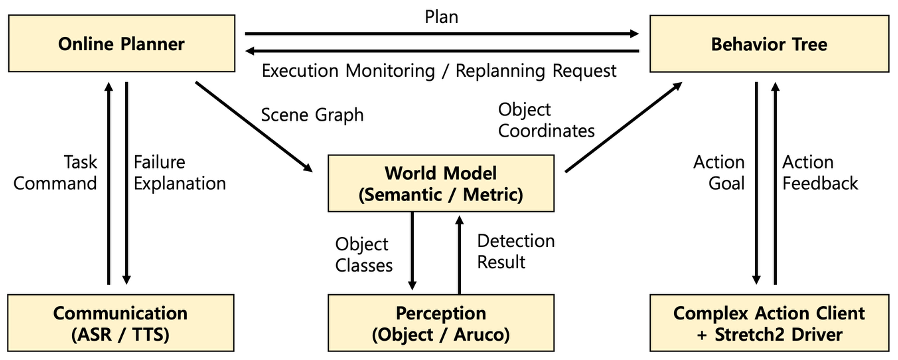
- Enabled interactive command understanding and execution by integrating OpenAI Whisper ASR and XTTS-2 TTS into the framework